AUBO机械臂构型介绍
1. 机械臂构型定义
ARAL 共定义了 8 种机械臂构型,其结构体定义如下:
enum class RobotConfiguration: int
{
LEFT, // 肩部朝左
RIGHT, // 肩部朝右
UP, // 肘部朝上
DOWN, // 肘部朝下
FLIP, // 腕部翻转
NOFLIP, // 腕部不翻转
NONE = -1,
// 3种状态标志(L/R)(U/D)(F/N), 一共包含如下8种情形
LUF = 0,
LUN = 1,
LDF = 2,
LDN = 3,
RUF = 4,
RUN = 5,
RDF = 6,
RDN = 7
};
2. Aubo i 系列构型判断条件
LEFT / RIGHT
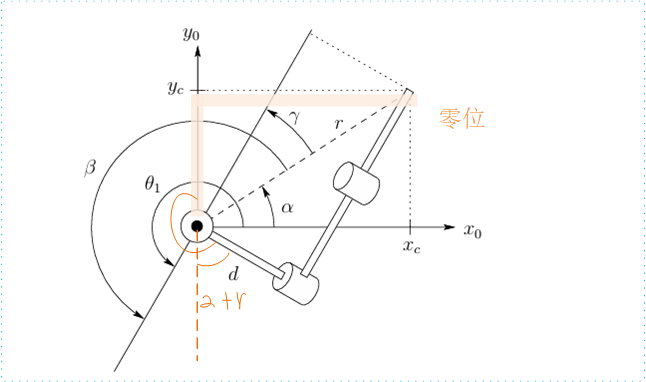
T05 原点在 xoy 的投影 为 点 B, T0 原点为点A, T02 原点在 xoy 的投影 为 点 C
- 点 C 在 AB 向量的左侧,为 left 构型
点 C 在 AB 向量的右侧,为 right 构型
目标 T05 在 xoy 的投影
| 几何图 | 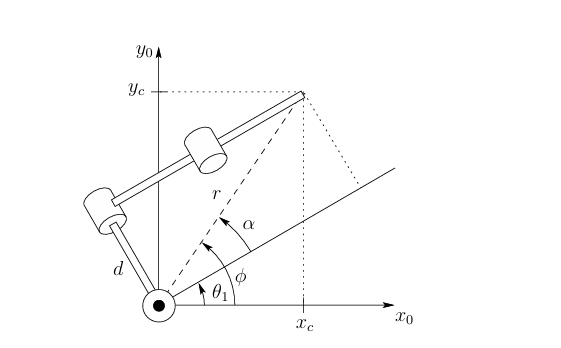 |
 |
|---|---|---|
| 构型 | LEFT (从 base 看向目标点) | RIGHT (从 base 看向目标点) |
UP / DOWN
- q3 <= 0 up
- q3 > 0 down
FLIP / NOFLIP
q5 <= 0 flip
q5 > 0 no flip
2. Aubo i5 构型示例
| 序号 | 示教器显示构型 | 构型 |
|---|---|---|
| 1 | 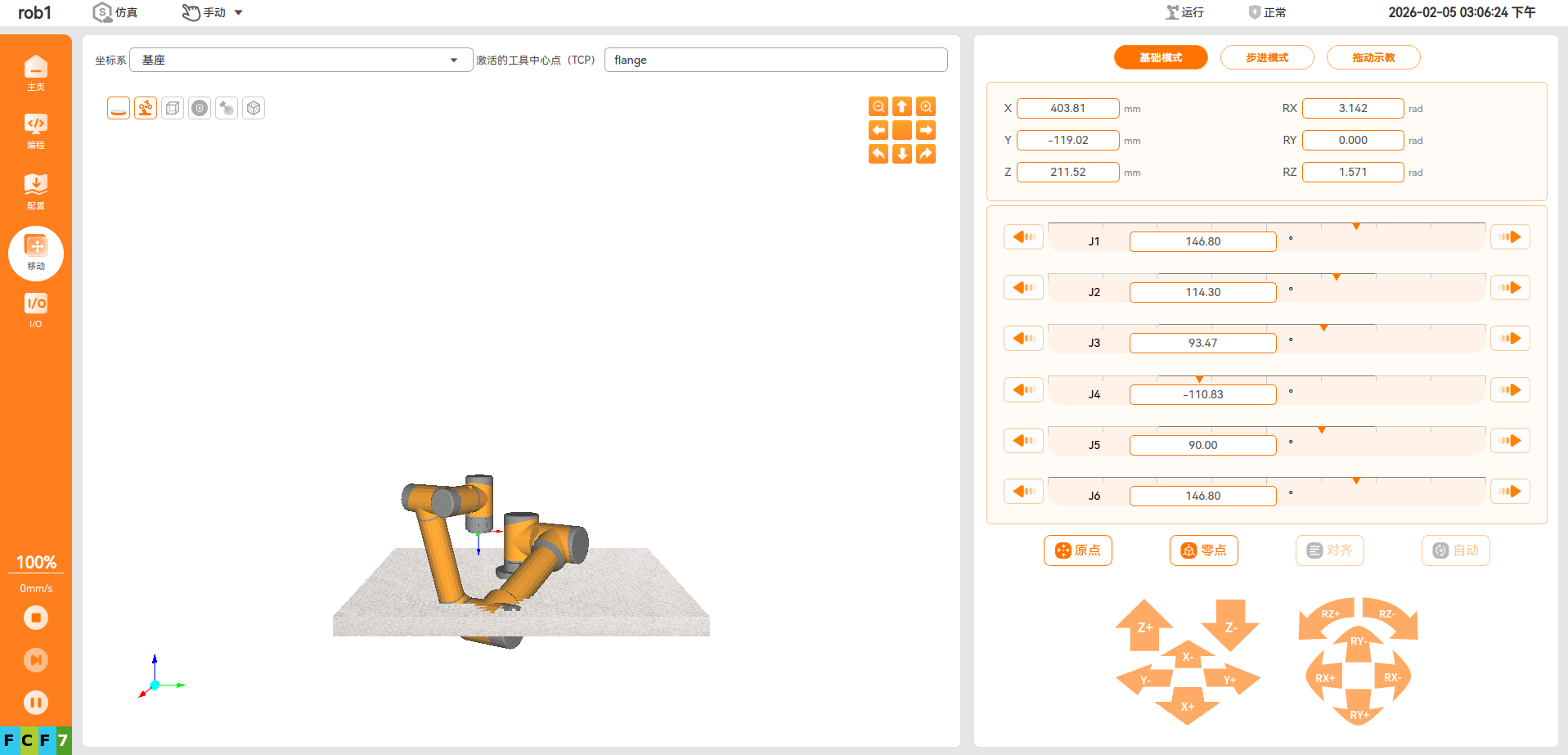 |
"LEFT" "DOWN" "NO_FLIP" |
| 2 | 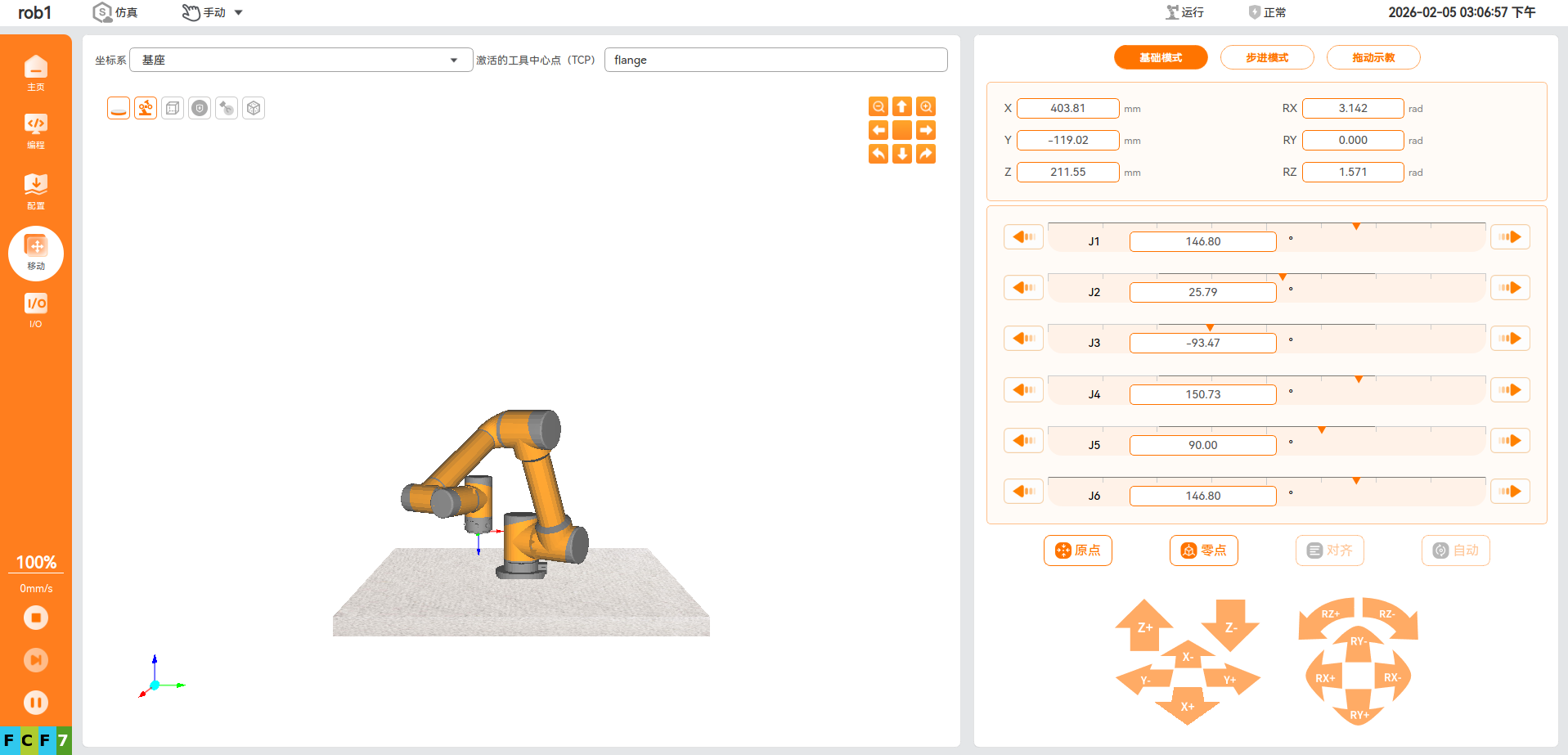 |
"LEFT" "UP" "NO_FLIP" |
| 3 | 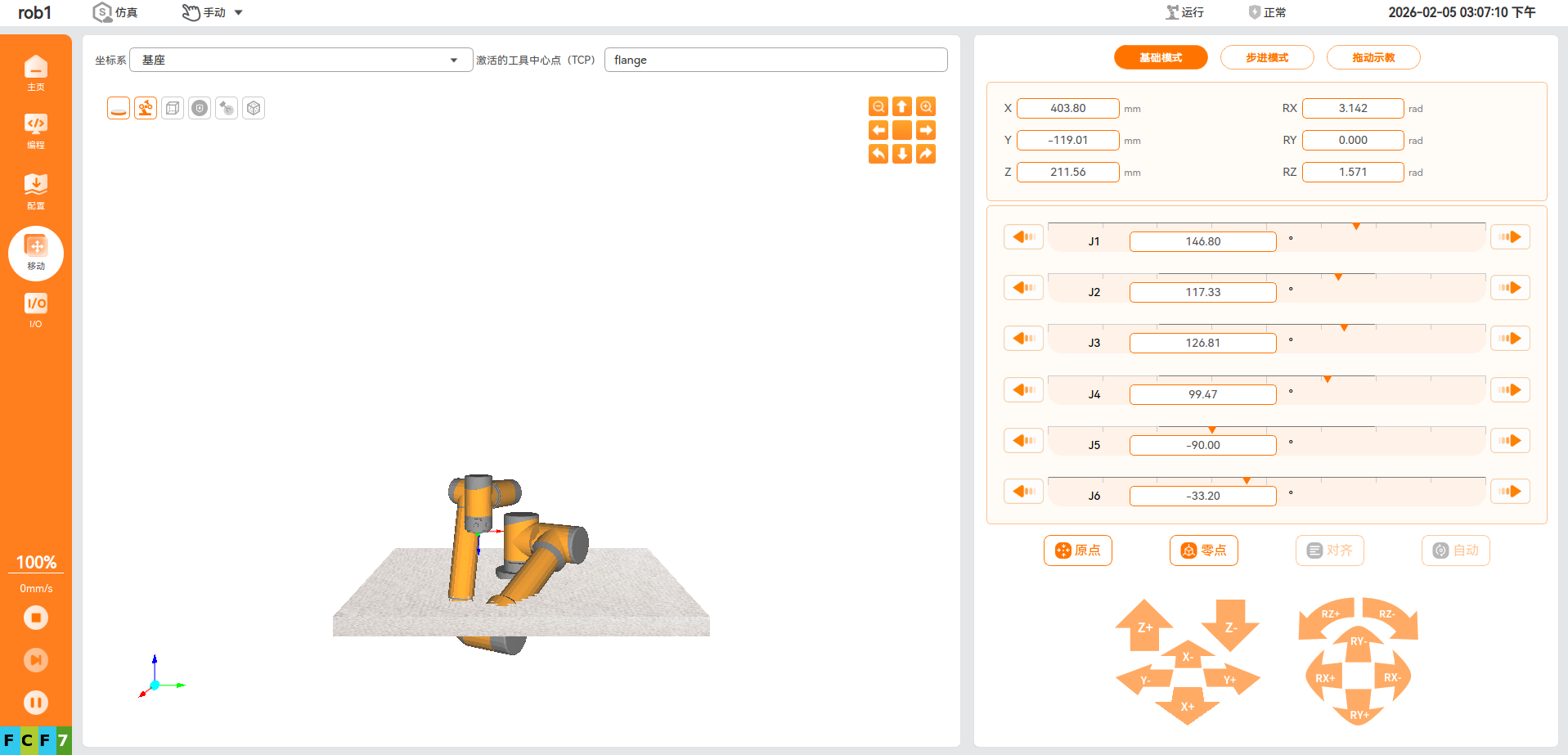 |
"LEFT" "DOWN" "FLIP" |
| 4 | 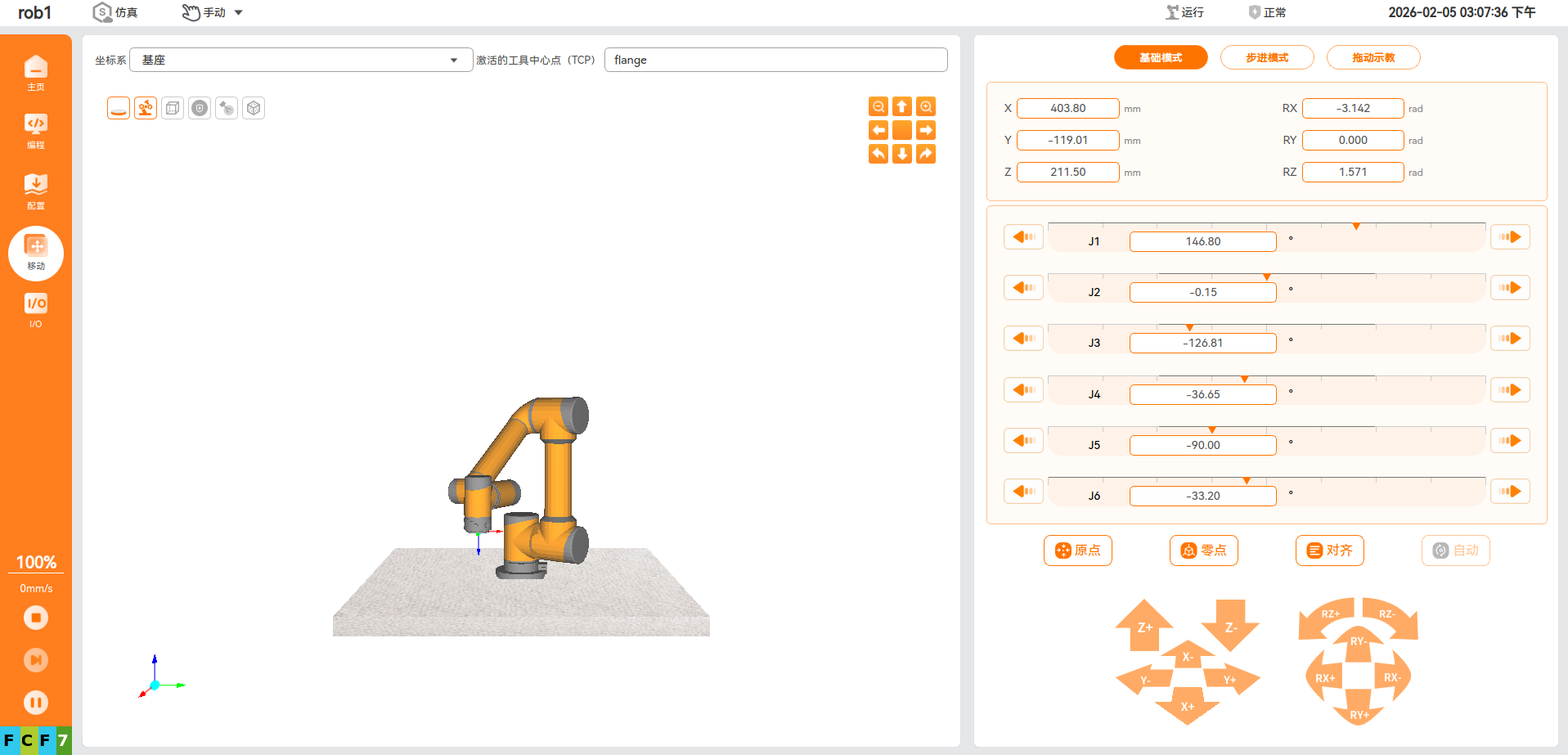 |
"LEFT" "UP" "FLIP" |
| 5 | 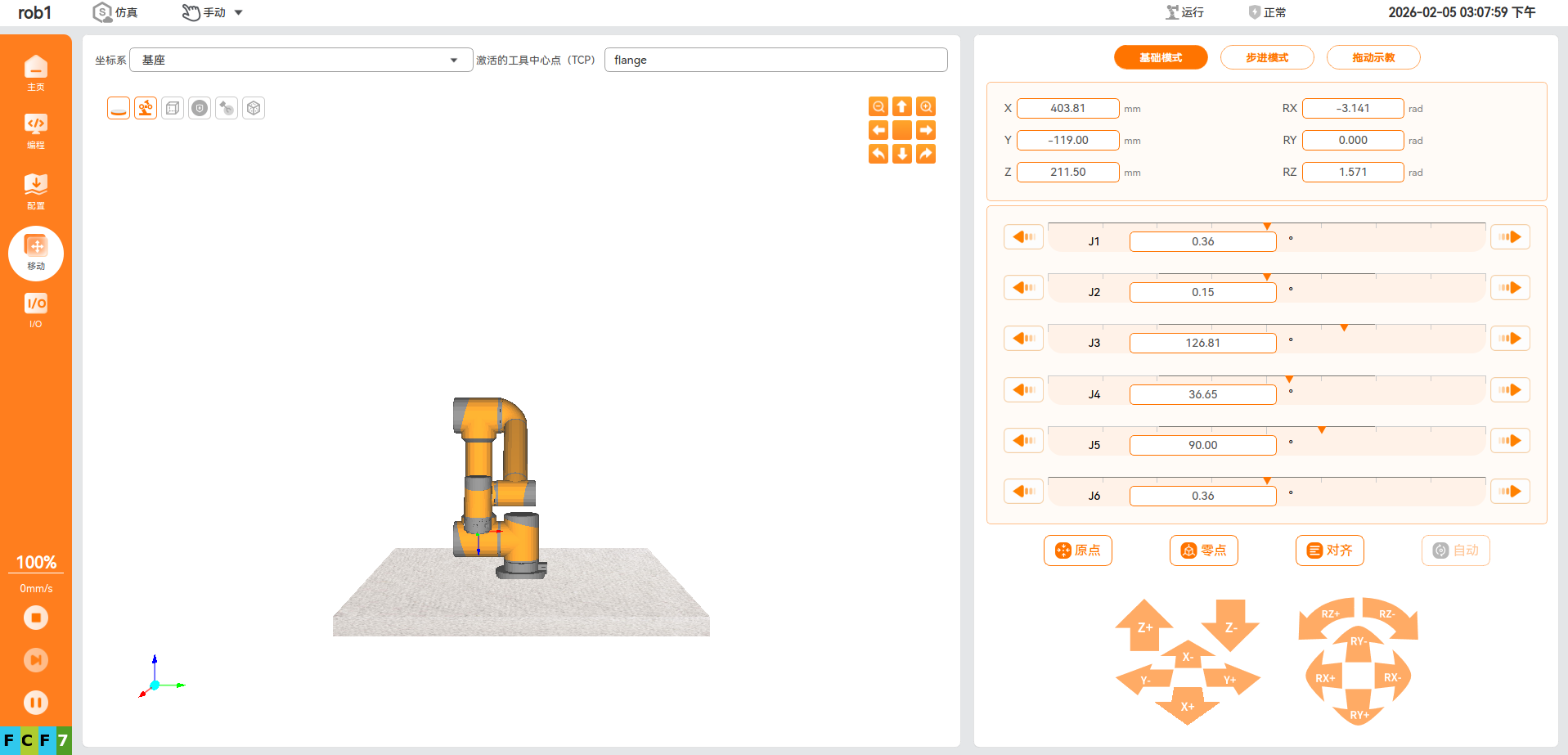 |
"RIGHT" "DOWN" "NO_FLIP" |
| 6 | 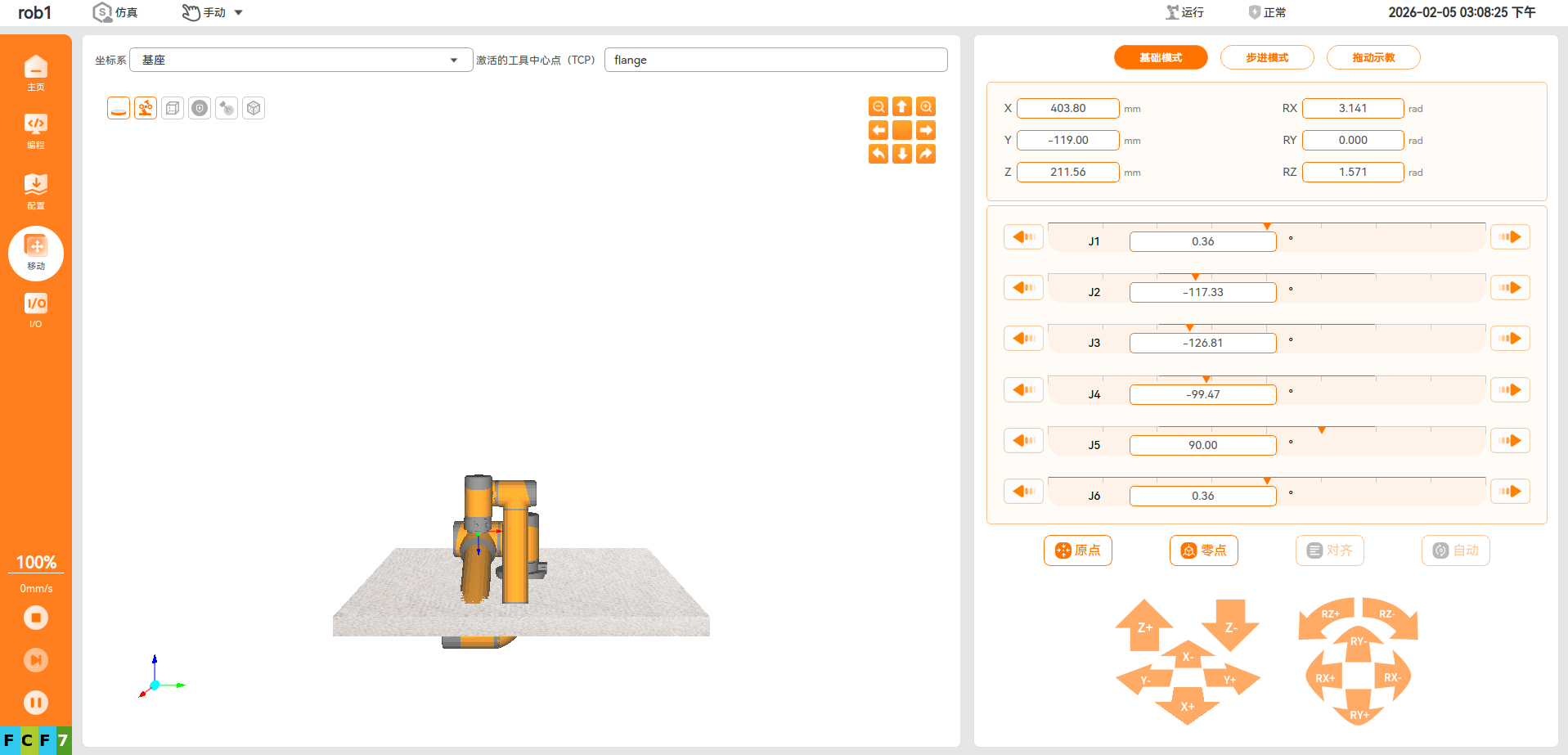 |
"RIGHT" "UP" "NO_FLIP" |
| 7 | 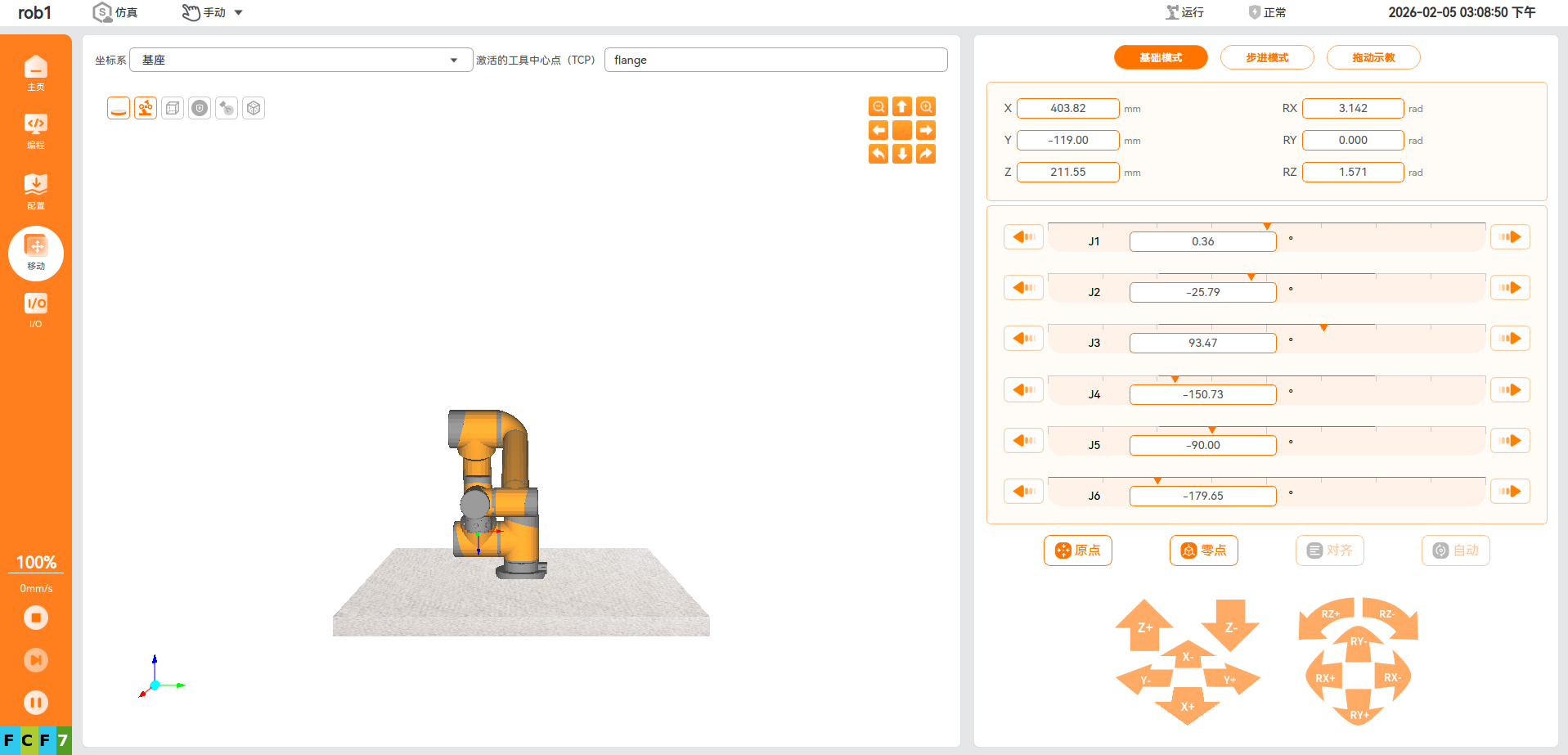 |
"RIGHT" "DOWN" "FLIP" |
| 8 | 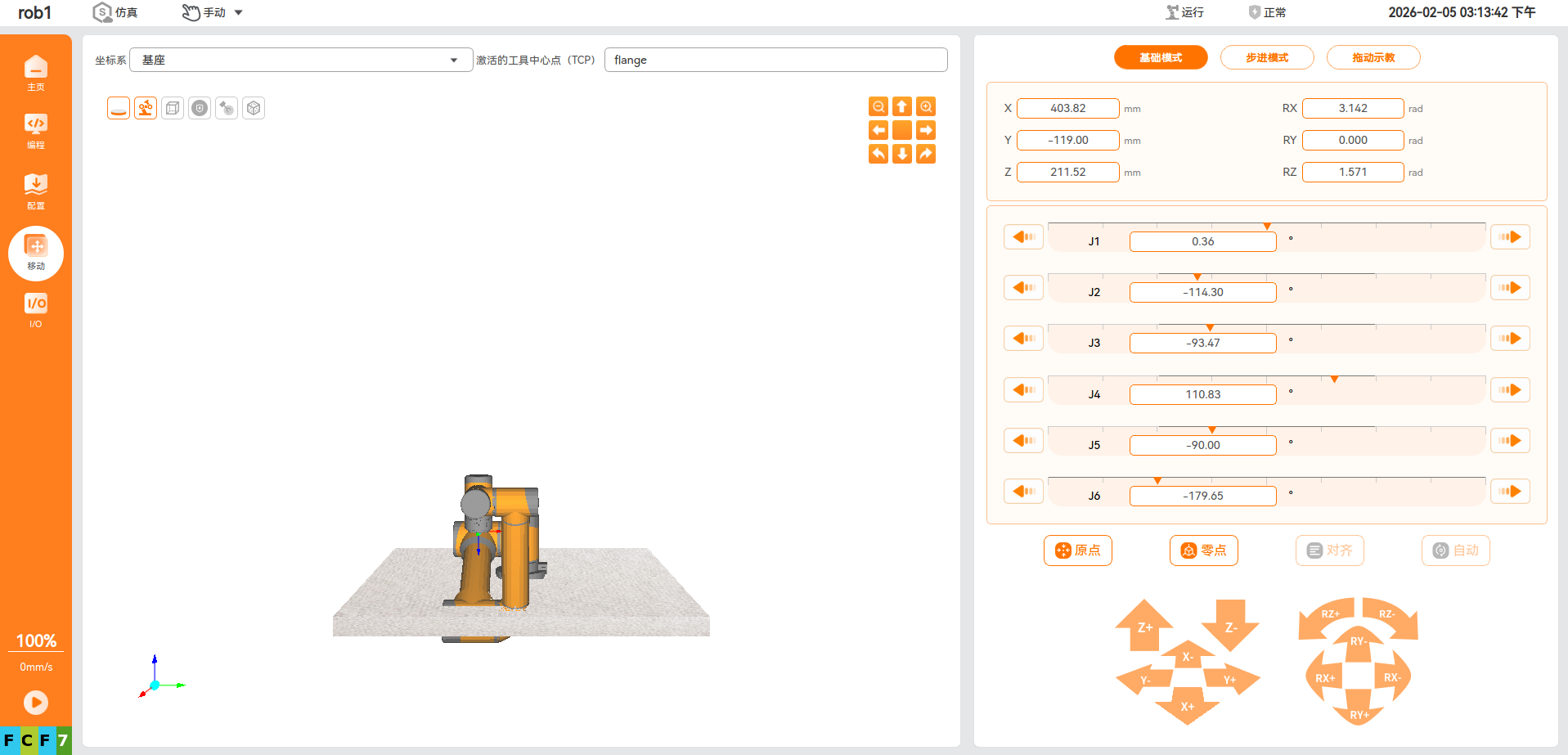 |
"RIGHT" "UP" "FLIP" |